��V90 0.1KW 200V�(q��)��(d��ng)��")

������Q(ch��ng)���Ϻ���ة���I(y��)�Ԅ�(d��ng)���O(sh��)������˾
(li��n)ϵ�ˣ�������������
(li��n)ϵ�֙C(j��)��
�̶��Ԓ(hu��)��
��I(y��)�]�䣺381033640@qq.com
(li��n)ϵ��ַ���Ϻ��н�ɽ�^(q��)�����(zh��n)����·99Ū6258̖(h��o)
�]����201501
(li��n)ϵ�ҕr(sh��)��Ո(q��ng)�f(shu��)���ں��ľW(w��ng)�Ͽ����ģ��x�x��
6SL3210-5FB10-1UA2���T(m��n)��V90 0.1KW 200V�(q��)��(d��ng)��

|
SINAMICS V90�� ݔ��늉��� 200-240 V 1 ��/���ཻ�� - 15 %/+ 10 % 2.5 A/1.5 A 45-66 ݔ��늉���0 �C ݔ�� 1.2 A 0-330 Hz 늙C(j��)��0.1 kW ���o(h��)��ʽ��IP20 �ߴ� A�� 45x170x170����x��x�
|
SIEMENS���T(m��n)��
�Ϻ���ة���I(y��)�Ԅ�(d��ng)���O(sh��)������˾
ȫ��ԭ�b���|(zh��)�����C������һ��
�N(xi��o)�ۼ��S�����T(m��n)�Ӹ��(l��i)�����Ԅ�(d��ng)�����;
��S7-200CN��S7-200SMART��S7-300��S7-400�� S7-1200��S7-1500��ET200��LOGO߉����ģ�K �����T(m��n)�ӿɾ��̿�����
���T(m��n)�Ә����Կ�
���T(m��n)��HMI�˙C(j��)���棺�|����
���T(m��n)��׃�l����MM420��MM430��MM440��G110��G120��6SE70
���T(m��n)�ӹ��I(y��)��̫�W(w��ng)��ͨӍ�W(w��ng)����ͨӍ��|��ͨӍ���^������(xi��n)�B���� ���ؙC(j��)�����Q�C(j��)���Ԅ�(d��ng)��ܛ����ϵ��̖(h��o)�Rȫ�����و�(b��o)�r(ji��)���I(m��i)�҂��Įa(ch��n)Ʒ�o(w��)�n(y��u)��ֵ���҂��Įa(ch��n)Ʒ�����Z�|(zh��)��һ�꣬���I(m��i)��ʡ�����ģ��õķ��ģ�
SINAMICS V90�����T(m��n)���Ƴ���һ��С�͡���Ч��ݵ��ŷ�ϵ�y(t��ng)�������� SINAMICS �(q��)��(d��ng)ϵ�м�����³ɆT���cSIMOTICS S-1FL6 �ŷ�늙C(j��)�����Y(ji��)�ϣ��M����ѵ��ŷ��(q��)��(d��ng)ϵ�y(t��ng)����(sh��)�F(xi��n)λ�ÿ��ơ��ٶȿ��ƺ�Ť�ؿ��ơ�Ŀǰ1FL6늙C(j��)�ЃɷN���a���(l��i)�ͣ����������a���(l��i)�ͼ��^��(du��)ֵ���a���(l��i)�͡�
���T(m��n)�ӵ�С���Ԅ�(d��ng)��S7-200 SMART PLC���Կ���V90�(q��)��(d��ng)�������Ľ�B��Ό�(sh��)�F(xi��n)SMART PLC�xȡ1FL6�ŷ�늙C(j��)�Ľ^��(du��)ֵ���a����(sh��)ֵ��
�P(gu��n)����Ό�(sh��)�F(xi��n)SMART PLC����V90��(sh��)�F(xi��n)��λ����Ո(q��ng)��Ҋ(ji��n)��SIMATIC S7-200 SMART ϵ�y(t��ng)�փ�(c��)������S7-200 SMART�B��SINAMICS V90 ��(sh��)�F(xi��n)λ�ÿ��ơ���
|
��̖(h��o) |
�O(sh��)�����Q(ch��ng) |
ӆ؛̖(h��o) |
|
1 |
PS207�Դ 24 V DC/2.5 A |
6EP1 332-1LA00 |
|
2 |
SIMATIC S7-200 SMART CPU ST60 |
6ES7288-1ST60-0AA0 |
|
3 |
V90�(q��)��(d��ng)�� |
6SL3210-5FE10-4UA0 |
|
4 |
�ŷ�늙C(j��) |
1FL6042-1AF61-0LG1 |
|
5 |
V90 ��(d��ng)����| (�����^) |
6FX3002-5CL01-1AD0 |
|
6 |
�ŷ�늙C(j��)���a����| |
6FX3002-2DB10-1AD0 |
|
7 |
V90 ������̖(h��o)��|���� 50 ᘽ��^�� 1m ��|��(xi��n)�� |
6SL3260-4NA00-1VB0 |
|
8 |
SIMATIC Field PG M3 |
6ES7715-1BB23-0AA1 |
|
9 |
Mini USB��| |
|
|
��̖(h��o) |
�f(shu��) �� |
|
1 |
Window 7 ��Ş�� 32λ |
|
2 |
STEP 7-Micro/WIN SMART ����ܛ�� |
|
3 |
SINAMICS_V-ASSISTANT |
��D1��ʹ��PGͨ�^(gu��)��(bi��o)��(zh��n)mini USB��|�cV90�B�ӣ����_(k��i)SINAMICS V��ASSITANTܛ���O(sh��)���(q��)��(d��ng)���ą���(sh��)��

�D1 PG�cV90�B��
��D2��ʾ��PLCͨ�^(gu��)V90�ϵ�RS485ͨӍ�xȡ���a���{(di��o)����B(t��i)����ͨ�^(gu��)V90�Ĕ�(sh��)����ݔ���z��V90���(q��)��(d��ng)����B(t��i)���Д�^��(du��)λ���Ƿ���Ч�����V90��DO1=1,DO2=0��DO3=1��r2507=3,�@��ζ��PLC������Ч���xȡ���a���Ľ^��(du��)λ�ã��˕r(sh��)����ͨ�^(gu��)RS485 USSͨӍ�xȡ�^��(du��)λ��(r2521[0]),��tr2521�ǟo(w��)Ч�ġ�PLC����ͨ�^(gu��)��(sh��)����ݔ����(b��o)��������(l��i)��ʾ�Ñ�(h��)��(d��ng)ǰr2521�o(w��)Ч���xȡr2521ֵ��,PLC����ͨ�^(gu��)PTI��ʽݔ���}�_�o�(q��)��(d��ng)����(zh��)������(y��ng)���\(y��n)��(d��ng)���ơ�
�D2 PLC�cV90ϵ�y(t��ng)�B�ӈD
����(j��)SIMATIC S7-200 SMART CPU ST60���\(y��n)��(d��ng)���ƹ�����̖(h��o)�����V90���Ӷ��x�M(j��n)�нӾ�(xi��n)��ԔҊ(ji��n)��SINAMICS V90 OPI�����փ�(c��)������ʹ��SINAMICS_V-ASSISTANT��(du��)SINAMICS V90�M(j��n)�Ѕ���(sh��)�O(sh��)���Լ���(du��)늙C(j��)�Ľ^��(du��)ֵ���a���M(j��n)���{(di��o)ԇ��ʹ��STEP 7-Micro/WIN SMART����ܛ����(du��)CPU ST60�M(j��n)�нM�B(t��i)�ͅ���(sh��)�����������E���1��ʾ��
��1.�������E
|
���E |
��(n��i)�� |
|
1 |
�Ӿ�(xi��n) |
|
2 |
�M(j��n)���ⲿ�}�_λ�ÿ���ģʽ��PTI���µ�ϵ�y(t��ng)�{(di��o)ԇ |
|
3 |
STEP 7-Micro/WIN SMART�B��S7-200 SMART |
|
4 |
�M�B(t��i)�\(y��n)��(d��ng)�S |
|
5 |
�M�B(t��i)�S��ˇ��(du��)��ą���(sh��) |
|
6 |
���d��PLC |
|
7 |
���S��������{(di��o)ԇ�S |
|
8 |
���� |
|
9 |
���d��PLC |
|
10 |
ԇ�\(y��n)�� |
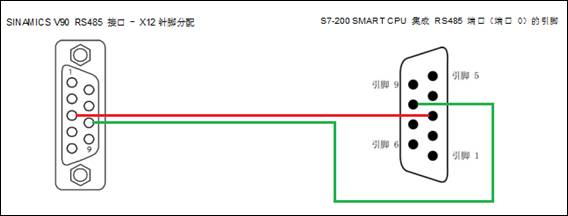
S7-200 SMARTͨ�^(gu��)PTI��ʽ����V90��λ�Ŀ�����̖(h��o)�Ӿ�(xi��n)��D4��ʾ��
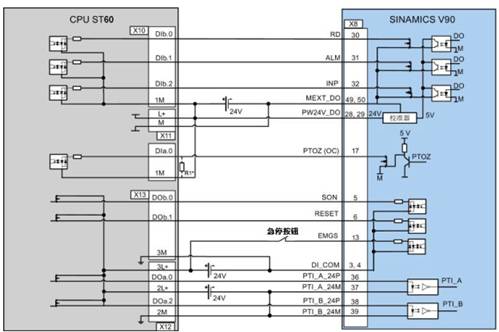
�D4 S7-200 SMART CPU �cV90������̖(h��o)�B��
3.4.1 λ�ÿ������P(gu��n)�ą���(sh��)
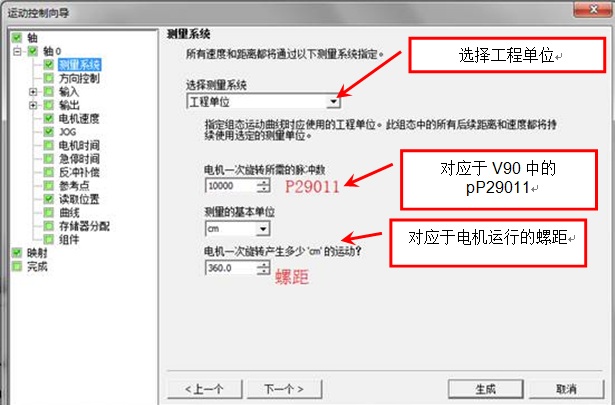
���ձ�2��ʾ��(du��)�ŷ��(q��)��(d��ng)����λ�ÿ������P(gu��n)�ą���(sh��)�M(j��n)���O(sh��)��
��2.V90 λ�ÿ��ƅ���(sh��)
|
����(sh��) |
�f(shu��)�� |
�O(sh��)�� |
|
P29003 |
����ģʽ�O(sh��)����PTI |
P29003 = 0 |
|
P29250 |
ʹ��PTI �^��(du��)λ��ģʽ |
P29250 = 1 |
|
P29010~P29014 |
PTI����ģʽ�µ����P(gu��n)����(sh��) |
����(j��)��(sh��)�H�l���O(sh��)�� |
|
P29012 P29013 |
λ�ÿ������P(gu��n)�ą���(sh��) |
����(j��)��(sh��)�H�l���O(sh��)�� |
3.4.2 USSͨӍ���P(gu��n)�ą���(sh��)
���ձ�3��ʾ��(du��)�ŷ��(q��)��(d��ng)����USSͨӍ���P(gu��n)�ą���(sh��)�M(j��n)���O(sh��)��
��3. V90 USSͨӍ����(sh��)
|
����(sh��) |
�f(shu��)�� |
�O(sh��)�� |
|
USS������ |
USS ������8(38400bits/s) |
ȱʡֵ |
|
P29004 |
USS ��ַ |
0-31 |
|
PKW/PZD |
USS PZD/PKW �L(zh��ng)�Ȟ�0/4 |
ȱʡֵ |
ע�⣺
PLC�� RS485�ӿڵIJ����ʺ��(q��)��(d��ng)��USS��ַҪ���cV90һ��, ��ˣ� ��Ҫ��(du��)V90��ą���(sh��)P29004�O(sh��)��һ�µ�USS��ַ������V90 USS RS485�˿ڵIJ������O(sh��)�Þ�38400bits/s����(b��o)���L(zh��ng)�Ȟ�4��(g��)PKW��0��(g��)PZD��USS�f(xi��)�h��
��PLC�ľ���ܛ���нM�B(t��i)�\(y��n)��(d��ng)�S��Ԕ��(x��)���E��Ҋ(ji��n)��SIMATIC S7-200 SMARTϵ�y(t��ng)�փ�(c��)����ע���ڽM�B(t��i)�S��ˇ��(du��)��ą���(sh��)���膢�Ï��(q��)��(d��ng)�����xȡ1FL6�ŷ�늙C(j��)�^��(du��)ֵ���a����λ�ã���D5��ʾ��
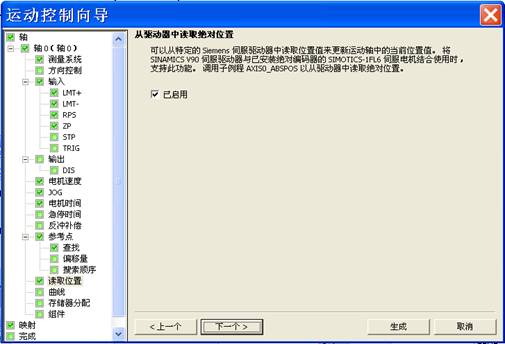
�D5 ���Ï��(q��)��(d��ng)�����xȡ1FL6�ŷ�늙C(j��)�^��(du��)ֵ���a����λ��
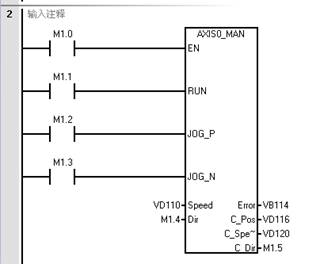
��PLC�о������4��ʾ��
��4. PLC����
|
���úͳ�ʼ���\(y��n)��(d��ng)�S����(zh��)��AXISx_CTRL ��

|
|
ʹ���ք�(d��ng)ģʽ�\(y��n)���S�\(y��n)��(d��ng)����(zh��)��AXISx_MAN��ݔ��RUN��JOG_P �� JOG_N֮һ��ʹ�S�ٶȻ�λ���c(di��n)��(d��ng)�\(y��n)�С� |
|
ͨ�^(gu��) SINAMICS V90 �ŷ��(q��)��(d��ng)���xȡ�^��(du��)λ��ֵ�� |
AXISx_ABSPOS ָ�������xȡSINAMICS V90 �ŷ��(q��)��(d��ng)���^��(du��)ֵ���a����(sh��)ֵ���xȡ�^��(du��)λ��ֵ��Ŀ���Ǟ��˸����\(y��n)��(d��ng)�S�еĮ�(d��ng)ǰλ��ֵ��
SINAMICS V90 �ŷ��(q��)��(d��ng)���c���b�˽^��(du��)ֵ���a���� SIMOTICS-1FL6 �ŷ�늙C(j��)�Y(ji��)��ʹ�Õr(sh��)��֧�ִ˹��ܡ�
AXISx_ABSPOS ָ���D_Pos ݔ����ָʾSINAMICS V90 �ŷ��(q��)��(d��ng)���^��(du��)ֵ���a����(sh��)ֵ��ԓ��(sh��)ֵֻ��AXISx_ABSPOS ָ������λ=1�r(sh��)��Ч��
���˱��CD_Pos�x��(sh��)�ķ�(w��n)��ֵ����Ҫ�������λ���������D(zhu��n)��ԓ��(sh��)ֵ��ԓ��(sh��)ֵ�@ʾ��ʽ��?y��n)��\(y��n)��(d��ng)���ƽM�B(t��i)��?q��)���ͬ���@ʾ��ͬ��������ʾ:
��1�����y(c��)��ϵ�y(t��ng)�x���̆�λ
����y(c��)��ϵ�y(t��ng)�x��顰���̆�λ�����tAXISx_ABSPOS.D_Pos��Ӌ(j��)�㹫ʽ���£�
AXISx_ABSPOS.D_Pos ![]() ����(sh��)��(j��)�(l��i)�͞�real ��
����(sh��)��(j��)�(l��i)�͞�real ��
���У�r2521�@ʾV90 �ľ��a����(sh��)�Hλ��ֵ��r2521���_�@ʾ����Ȍ�V90�(q��)��(d��ng)��ABS��
ע����߅��ʽ�ļ��O(sh��)�l����P29247 = 2^20=1048576, P29248 = 1, P29249 = 1
��2�����y(c��)��ϵ�y(t��ng)�x������(du��)�}�_
����y(c��)��ϵ�y(t��ng)�x��顰����(du��)�}�_�����tAXISx_ABSPOS.D_Pos��Ӌ(j��)�㹫ʽ���£�
AXISx_ABSPOS.D_Pos ![]() ����(sh��)��(j��)�(l��i)�͞�DINT��
����(sh��)��(j��)�(l��i)�͞�DINT��
6SL3210-5FB10-1UA2���T(m��n)��V90 0.1KW 200V�(q��)��(d��ng)��