

������Q���Ϻ���ة���I�Ԅӻ��O������˾
ϵ�ˣ�������������
ϵ�֙C��
�̶��Ԓ��
��I�]�䣺381033640@qq.com
ϵ��ַ���Ϻ��н�ɽ�^����悛���·99Ū6258̖
�]����201501
ϵ�ҕr��Ո�f���ں��ľW�Ͽ����ģ��x�x��
���T��CP1613ͨӍ̎����6GK11623AA00

|
ͨ��̎���� CP 1623 PCI express X1��3��3V/12V) �����B�ӹ��I ��̫�W��10/100/1000 Mb/s�� �� 2 �ӿ��_�P(RJ45)ͨ�^ HARDNET-IE S7 �� S7-REDCONNECT ����ϵ�y֧�օ�Ҋ SIMATIC NET ܛ�� �� SIMATIC NET CD ������ V7.0 HF1
|
S7-200 SMART �c S7-200һ�ӣ�֧��8·PID���ƣ�֧��ģ�M��ݔ����PWMݔ��
�� S7-200 ����PID�����ɵij����� S7-200 SMART���_����ʾ�e�`�����D��ʾ��

�D1. S7-200 PID������S7-200 SMART ���_���e
��Q������
1���½� S7-200 SMART�Ŀ�����M�����_���O��M�B
2���� S7-200������STEP 7-Micro/win SMART ܛ�����_������PID�ӳ���֮��ij���Ώ��Ƶ����Ŀ
3�������Ŀ�� I/O ��ַ��ģ�M���D�Q�����cS7-200 SMART ƥ��
���^ S7-200 �c S7-200 SMART PID��·����������ȫ��ͬ�����±���ʾ��
��1. S7-200 �c S7-200 SMART PID ��·���ȱ�
|
ƫ�� |
��� |
S7-200 | S7-200 SMART |
|---|---|---|---|
| 0 |
�^��׃��(PVn) |
�����^��׃������ֵ��횘˶��� 0.0 �� 1.0 ֮�g |
|
| 4 |
�O��ֵ(SPn) |
�����O��ֵ����ֵ��횘˶��� 0.0 �� 1.0 ֮�g |
|
| 8 |
ݔ��(Mn) |
����Ӌ�����ݔ������ֵ��횘˶��� 0.0 �� 1.0 ֮�g |
|
| 12 |
����(Kc) |
�������棬����������� ������������ؓ�� |
|
| 16 |
�ɘӕr�g |
�����ɘӕr�g����λ���롣 ��������� |
|
| 20 |
�e�֕r�g |
�����e�֕r�g���λ����λ��� |
|
| 24 |
�֕r�g |
�����֕r�g�����ʣ���λ��� |
|
| 28 |
ƫ�� |
����ƫ�û�e�ֺ�ֵ������ 0.0 �� 1.0 ֮�g |
|
| 32 |
ǰһ�^��׃�� |
�����ϴΈ��� PID ָ��r�惦���^��׃��ֵ |
|
| 36 |
PID�Uչ�� |
��PIDA����PID �Uչ�����汾 A���� ASCII ���� |
|
| 40 |
AT ���� |
||
| 41 |
AT ��B |
||
| 42 |
AT �Y�� |
||
| 43 |
AT ���� |
||
| 44 |
ƫ�� |
��� PV ��ʎ���ȵĘ˜ʻ�ֵ�������� 0.025 �� 0.25�� |
|
| 48 |
���� |
���ڴ_���^��� PV ����˜ʻ�ֵ�������� 0.005 �� 0.1�� |
|
| 52 |
��ʼݔ���A�S |
ݔ��ֵ���A�S׃���Ę˜ʻ���С������ʹ PV �a����ʎ��������0.05 �� 0.4�� |
|
| 56 |
���T���r�g |
�ɴ��^��֮�g���S������딵ֵ��������60 �� 7200�� |
|
| 60 |
���h���� |
�������^�̴_���Ľ��h��·���� |
|
| 64 |
���h�e�֕r�g |
�������^�̴_���Ľ��h�e�֕r�g |
|
| 68 |
���h�֕r�g |
�������^�̴_���Ľ��h�֕r�g |
|
| 72 |
���H�A�S��С |
�������^�̴_���Ę˜ʻ�ݔ���A�S��Сֵ |
|
| 76 |
���H���� |
�������^�̴_���Ę˜ʻ� PV ����ֵ |
|
���ϱ���ʾ������PID��·����ȫһ�£����ԣ�����S7-200 PID ָ����M����ֲ�r���茢�����cݔ����ģ�M����ַ���� S7-200 SMART �ĵ�ַ�����M���ģ�ͬ�r��ģ���D�Q��ֵ���ɡ����D��ʾ��
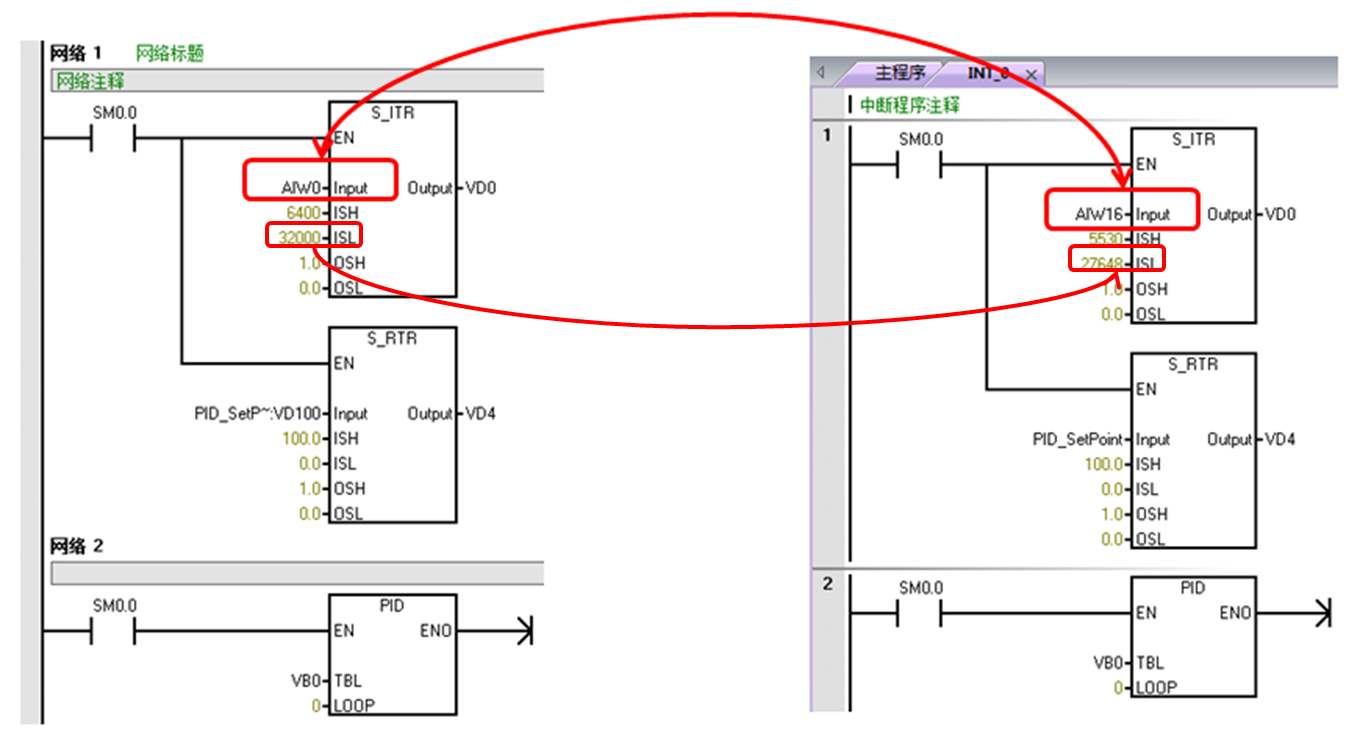
�D2. ������ֲ
���T��CP1613ͨӍ̎����6GK11623AA00

















