������Q���Ϻ�����늚⼼�g(sh��)����˾
(li��n)ϵ�ˣ�������������
(li��n)ϵ�֙C��
�̶��Ԓ��
��I(y��)�]�䣺192061030@qq.com
(li��n)ϵ��ַ���Ϻ����ɽ��^(q��)���±�·1800Ū���ɽ�����̄�(w��)�@�^(q��)��
�]����201501
(li��n)ϵ�ҕr��Ո�f���ں��ľW(w��ng)�Ͽ����ģ��x�x��
���T��6SE7041-2WL84-1JC1
�����u��һ���\�Ž��ס����L���N�ۡ���ȫ��(w��n)����
���Q�ĝM�⡢����(w��)�����������\�挦����ͨ�o�ޡ�
������(w��)��һ��һ�Zǧ�𡿡��|(zh��)�����Z���͑��M�⡿
���a(ch��n)Ʒ���Q�������T��6SE7041-2WL84-1JC1
���a(ch��n)ƷҎ(gu��)��ȫ��ԭ�b
���a(ch��n)Ʒ�|(zh��)�������|(zh��)�����C
���a(ch��n)Ʒ�r���r��(y��u)��
���a(ch��n)Ʒ؛�ڡ����F(xi��n)؛�N��
ϣ��늚⼼�g(sh��)(�Ϻ�)����˾(���T�Ӻ�����飩
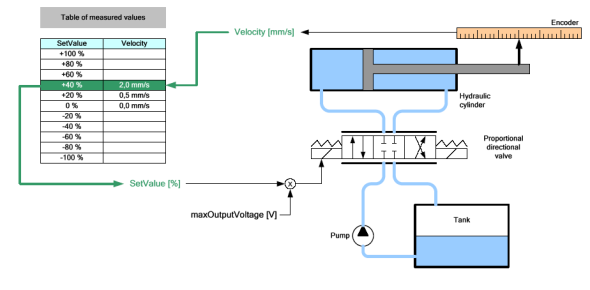
1.Һ���ŷ�ϵ�y(t��ng)����
Һ���ŷ�ϵ�y(t��ng)����푑�(y��ng)�ٶȿ죨�����ڙCеϵ�y(t��ng)����ؓ�d���ȴ��ƹ��ʴ�Ȫ��صă�(y��u)�c�ڹ��I(y��)�����еõ��ˏV���đ�(y��ng)�á����Һ�ŷ�ϵ�y(t��ng)��ͨ�^ʹ���Һ�ŷ��y����С���ʵ����̖�D(zhu��n)�Q����ʵ�Һ���������Ķ����F(xi��n)��һЩ���͙Cе�O(sh��)����ŷ����ơ�
1.1 Һ���ŷ�ϵ�y(t��ng)�ĽM��
Һ���ŷ�ϵ�y(t��ng)��Ҫ�����ײ��ֽM�ɣ���D 1����
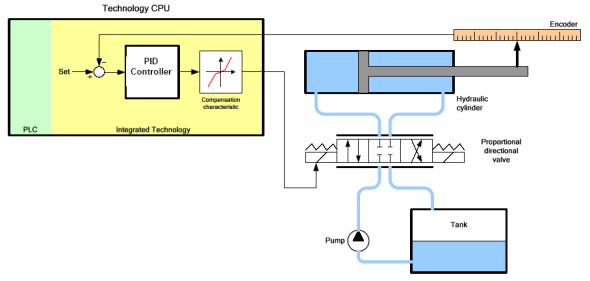
�D1. Һ���ŷ�ϵ�y(t��ng)
ʹ��TCPU����Һ���ŷ�ϵ�y(t��ng)�r��TCPU����ԓϵ�y(t��ng)�еĿ�������TCPU����ͨ�^�}�_����ģ�M��ݔ�������Ʊ����Q���y���_�Ⱥͷ���Ķ�����Һ�����\�ӷ�����ٶȣ��y������ϵ�y(t��ng)�������O(sh��)�侎�a������ģ�M����̖ͨ�^IM174�ӿ�ģ���ģ�M��ݔ��ģ�匢��̖�����oTCPU��
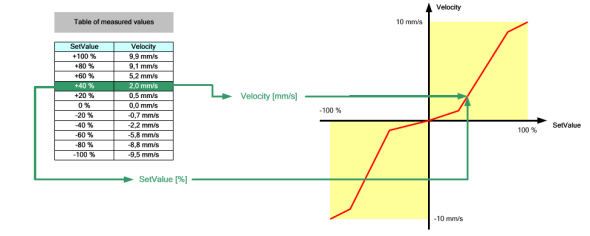
1.2 Һ���ŷ�ϵ�y(t��ng)�c늚��ŷ�ϵ�y(t��ng)�^(q��)�e
����늚��ŷ�ϵ�y(t��ng)�r����(zh��)�ЙC��(g��u)��ͨ�����ŷ�늙C���܉����(j��)�ٶȽo����׃�\���ٶȣ�푑�(y��ng)�죬�ӑB(t��i)���Ժã��o���cݔ��֮�g�ʾ��Ա����P(gu��n)ϵ����Һ���ŷ�ϵ�y(t��ng)����Һ���͵��������ԛQ������푑�(y��ng)�ٶȺ̈́ӑB(t��i)���Զ��^�ͣ�������Һ���ŷ�ϵ�y(t��ng)���ӡ�ֹͣ�Լ��Q��r�������F(xi��n)������ԣ��@�Ӿ͌�(d��o)��ݔ���o���c��(zh��)���ٶ�֮�g���P(gu��n)ϵ�����Ǿ��εģ���D 2�����@�ӣ�һ���҂�߀�Կ��ƾ���늚��S��ģ�́����ƷǾ���Һ���S�r���ٶȕ��dz�����(w��n)��������λ���]�h(hu��n)����ͣ���������ٶȲ���(w��n)����������λ��ƫ��@�rҺ����(zh��)�ЙC��(g��u)�͕��������ӻ��߶��ӣ���ɶ�λ�`��������p�ęCе�O(sh��)�䡣�����҂��ڿ���Һ���ŷ�ϵ�y(t��ng)�r�͑�(y��ng)ԓ���˽�ԓϵ�y(t��ng)�Ľo���cݔ��֮�g���P(gu��n)ϵ���_���a�����������C��(zh��)�ЙC��(g��u)ƽ��(w��n)�\�С�
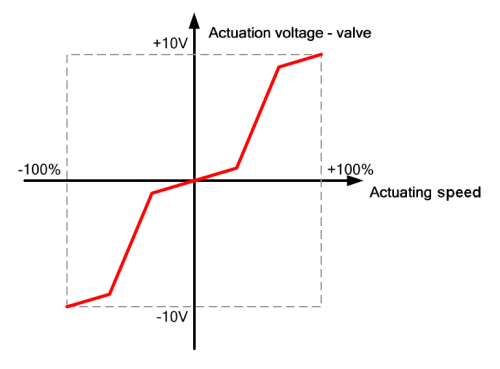
�D 2. �o���c���H�ٶȵ��P(gu��n)ϵ
�� TCPU �У��a�����������ɶ�N�������_�������� S7T Config �е� Trace ���ߣ�����(j��)ݔ����ͬ�Ľo��ֵ�͌��H���ٶ�ֵ���_�����a�c�������a�c��ֵ�Ա���ķ�ʽ���뵽 Cam Disk ��݆�P���С�
������Ҫ��Bʹ���Ԅӫ@���a���������܉K FB 520��GetCharacteristics�� �� FB 521��WriteCamData�����_�����a������
2.ϵ�y(t��ng)�Y(ji��)��(g��u)��ܛӲ��Ҫ��
2.1 ϵ�y(t��ng)�Y(ji��)��(g��u)
��ϵ�y(t��ng)�Ľo���ͷ�����ʹ�ø�����ET200M��AI/AOģ��팍�F(xi��n)����D 3����
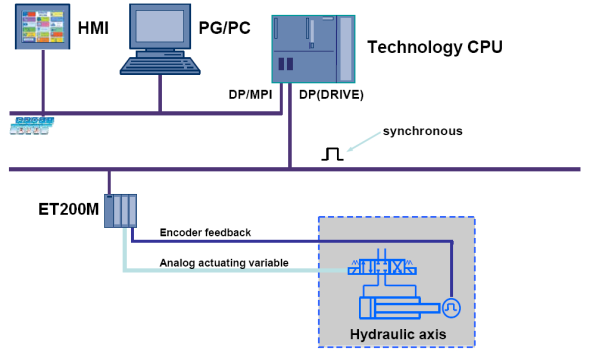
�D 3. ϵ�y(t��ng)�Y(ji��)��(g��u)�D
2.2 Ӳ����ܛ��Ҫ��
| ���Q | ��(sh��)�� | ӆ؛̖ |
| CPU 315T-2 DP | 1 | 6ES7315-6TG10-0AB0 Or 6ES7315-6TH13-0AB |
| Firmware: V2.6 | ||
| Or CPU 317T-2 DP | 1 | 6ES7317-6TJ10-0AB0 Or 6ES7317-6TK13-0AB0 |
| Firmware: V2.6 | ||
| Micro Memory Card 4MB | 1 | 6ES7953-8LM20-0AA0 |
| Interface module IM174 | 1 | 6ES7174-0AA00-0AA0 |
| Or ET200M / ET200S | 1 | 6ES7 153-2BA02-0XB0 or 6ES7 151-1BA02-0AB0 |
| STEP 7 | 1 | 6ES7810-4CC08-0YA7 Version: V5.4 ���� |
| S7 Technology | 1 | 6ES7864-1CC41-0YX0 Version: V4.1 ���� |
�� 1. Ӳ����ܛ��Ҫ��
3.�Ŀ�����^�̣�
3.1 Ӳ���M�B(t��i)
�� SIMATIC �������Є�(chu��ng)���µ��Ŀ������һ�� SIMATIC 300 վ�c������(j��)���HӲ������Ӳ���M�B(t��i)��������ʹ��ģ�M��ݔ��ݔ������o���ͷ�����̖���M�B(t��i)ģ�M��ݔ��ݔ�������� I/O ��ַ(�D 4)��
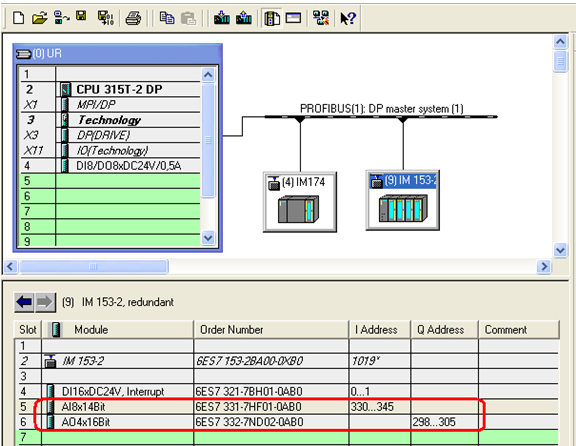
�D 4. Ӳ���M�B(t��i)
3.2 �� S7T Config ������Һ���S
�� S7T Config �Ğg�[���У��p���������S��(Insert axis)���D 5��
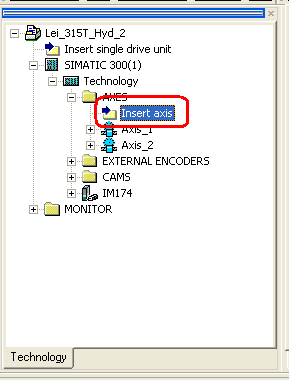
�D 5. ����Һ���S
�ڡ���Ҏ(gu��)��(General) �x헿��У��x���ٶȿ��ơ�(Speed control) �͡���λ��(Positioning) ����Ȼ����_�S��?q��)��?br /> ���S���Ԓ���У��x��Һ����(Hydraulic) �S��͡� ���y��Ͷ��x�顰Q �y��(Q valve)���D 6����
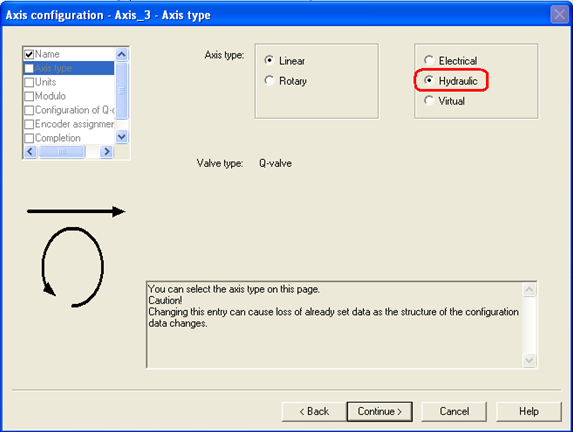
�D 6. �x���S�����
������Һ���S�������λ��ģ�Ⱥ��M�뵽ݔ��ݔ�������ý��棬���x����ݔ����ʽģ�M��ݔ��ģ�壨�D7 ����
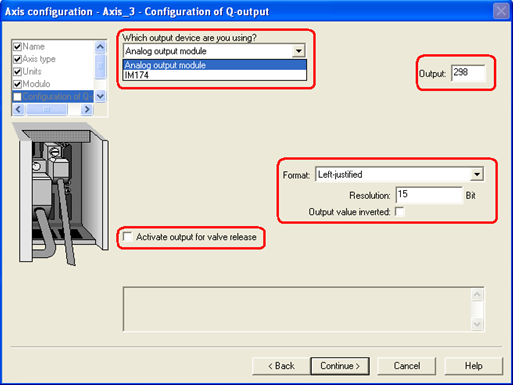
�D 7. �x��ݔ����ʽ
�x��ݔ���O(sh��)���ģ�M��ݔ��ģ�K����������(y��ng)����(sh��):
�c���^�m(x��)�M�뵽λ�÷�������(sh��)���棬����ʹ�õ�ģ�M��ݔ��ĵ�ַ���D 8����
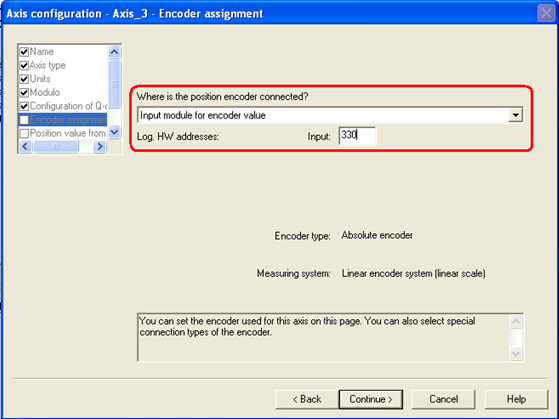
�D 8. �x������ʽ
�c���^�m(x��)���M�뵽λ�÷�������(sh��)������棨�D 9����
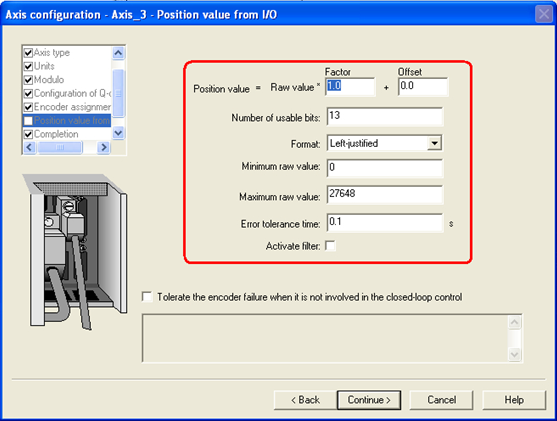
�D 9. ��������(sh��)����
���P(gu��n)ݔ��?y��n)��?sh��)��
���������Ѕ���(sh��)���Γ�����ɡ�(Finish) �˳��S�M�B(t��i)��Ԓ��
3.3 �����a������݆�P
����(j��)ǰ�����ᵽ�ģ�Һ���ŷ�ϵ�y(t��ng)��Ҫ�_��һ�l�a�����������Ի�ݔ��׃���cҺ���S�ٶ�֮�g���P(gu��n)ϵ���� TCPU ��ͨ�^ʹ��݆�P��Cam Disk����ˇ������_���a��������Һ���ŷ��S���a��������ӳ��Һ�������yݔ���o���cҺ���S�ٶ�֮�g�Č���(y��ng)�P(gu��n)ϵ�����ڱ���ʹ�ù��܉K FB 520 ��GetCharacteristics�� �� FB 521��WriteCamData�� ���Ԅӫ@���a��������������Ҫ�����ɂ�݆�P��Cam Disk�����_���a�����������е�һ��݆�P���Á�y���������a���c�����y����ĽY(ji��)�������뵽����һ��݆�P���@���������݆�PҲ���Ǯ�ǰҺ���ŷ�ϵ�y(t��ng)����K�a��������
�� CAMS ���潨���ɂ�݆�P���քeȡ���飺Cam_Profile �c Cam_Reference��������ɂ����a�c���Lһ�lݔ���o���c��(zh��)���ٶ��g�ą����P(gu��n)ϵ��������D 10��
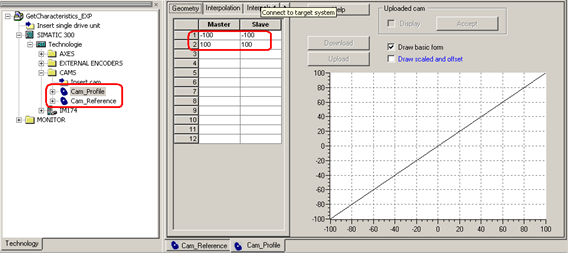
�D 10. �����a������݆�P
�������Ϲ����� S7T-Config ��P���g�������M�B(t��i)�õ��S��݆�P�ȹ�ˇ������������(y��ng)�Ĺ�ˇ����(sh��)��(j��)�K�������d�� TCPU�������й�ˇ����(sh��)��(j��)�K����(y��ng)�飺
4.����������
4.1 ʹ�� FB 520 �� FB 521 �Ԅӫ@���a������
FB 520 ��GetCharacteristics�� �� FB 521��WriteCamData���ɂ����܉K���]���� S7-Tech �����ṩ��������Ҫ������朽����d�����Ŀ�������Ŀ�е�FB520��FB521��(f��)�Ƶ��Լ����Ŀ�Ё���
���d朽ӣ�27731588
4.2 FB 520 �� FB 521 �Ĺ��ܽ�B
4.2.1 FB 520 ��GetCharacteristics��
ͨ�^ԓ���܉K��ϵ�y(t��ng)�܉��(zh��)�Мy�����õ���ǰҺ��ϵ�y(t��ng)���a����������������(y��ng)��Cam Disk����鮔ǰҺ��ϵ�y(t��ng)��Profile�����(n��i)���{(di��o)�ýY(ji��)��(g��u)��D 11��
�D 11. FB 520 �Y(ji��)��(g��u)
4.2.2 FB 521 ��WriteCamData��
ԓ���܉K�܉�?q��)��y�����a���������뵽����(y��ng)��Cam Disk�С����(n��i)���{(di��o)�ýY(ji��)��(g��u)��D 12��
�D 12. FB 521 �Y(ji��)��(g��u)
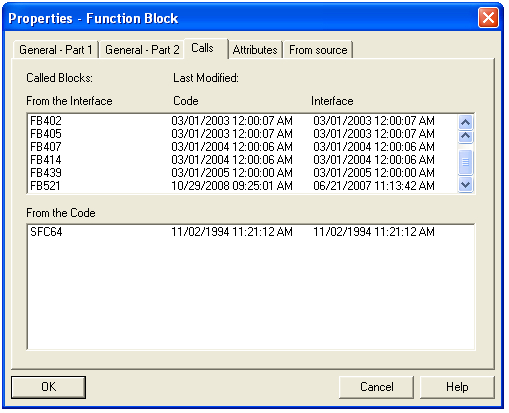
���@�ɂ����܉K�ĽY(ji��)��(g��u)�D���Կ��������(n��i)���{(di��o)���˺ܶ�S7-Tech����Ĺ��܉K��������Ҫ���@Щ���܉K��(f��)�Ƶ���ǰ���Ŀ�Ё������ң����Կ�����FB520���܉K��(n��i)���ѽ�(j��ng)�{(di��o)����FB521������ֻҪ���CFB 521���Ŀ�д��ھͿ����ˣ�����Ҫ�ڳ����ІΪ��{(di��o)�á��� 2 ��FB520,FB521��ʹ�õ���S7-Tech���܉K��
| PLC-Open FB | ���� |
| FB 402 ��MC_Reset�� | ��(f��)λ���ܳ��F(xi��n)���e�` |
| FB 405 ��MC_Halt�� | ֹͣ�S�\�� |
| FB 407 ��MC_WriteParameter�� | ��ϵ�y(t��ng)����(sh��) |
| FB 414 ��MC_MoveVelocity�� | ʹ�S�\�ӣ����ɸ�׃���\���ٶ� |
| FB 434 ��MC_CamClear�� | �h��һ��݆�P�е����в��a�c |
| FB 435 ��MC_CamSectorAdd�� | ����һ���µIJ��a�c��݆�P�� |
| FB 436 ��MC_CamInterpolate�� | ��݆�P�IJ��a�c |
| FB 439 ��MC_SetCharacteristics�� | ����һ��݆��������Һ���y���������� |
�� 2. ʹ�õ� S7-Tech ���܉K
4.2.3 FB520�Ĺ��_���䶨�x���D 13 ���� 3����
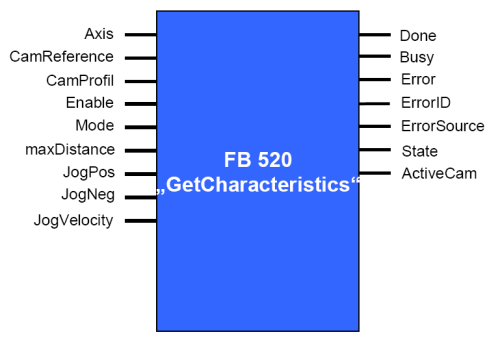
�D 13. FB 520 ���_���x
| ���Q | ���x |
| ݔ��?y��n)��?sh��) | |
| Axis | Һ���S��ˇDB̖ |
| CamReference | ��(zh��)�Мyԇ�r�ą���݆�P�Ĺ�ˇDB̖ |
| CamProfil | ��KҪ�����݆�P�Ĺ�ˇDB̖ |
| Enable | ʹ�� |
| Mode | ��(zh��)��ģʽ |
| maxDistance | ��(zh��)�Мyԇ�r������ƄӾ��x |
| JogPos | �����c�� |
| JogNeg | ؓ���c�� |
| JogVelocity | �c���ٶ� |
| ݔ������(sh��) | |
| Done | �y����� |
| Busy | æ |
| Error | ���e�` |
| ErrorID | �e�`���a |
| ErrorSource | �e�`Դ |
| State | ��ǰ��B(t��i) |
| ActiveCam | ��ǰ��(zh��)�е�݆�P�Ĺ�ˇDB̖ |
�� 3. FB 520 ���_���x
4.3 ��OB1���{(di��o)��FB520���D 14��
�D 14. �� OB1 ���{(di��o)�� FB 520
ʹ�ò��E��
4.4 FB 520 ��GetCharacteristics�� �Ĝy��ԭ�����D 15��
�D 15. FB 520 �Ĝy��ԭ��
4.5 FB 520 ��GetCharacteristics�� �a�������Č����^�̣��D 16����
�D 16. �a�����������^��
4.6 FB 520 ��GetCharacteristics�� ��(zh��)�Еr�Ļ������E
4.7 FB 520 ��GetCharacteristics�� �� 42 �N��(zh��)��B(t��i)���D 17����
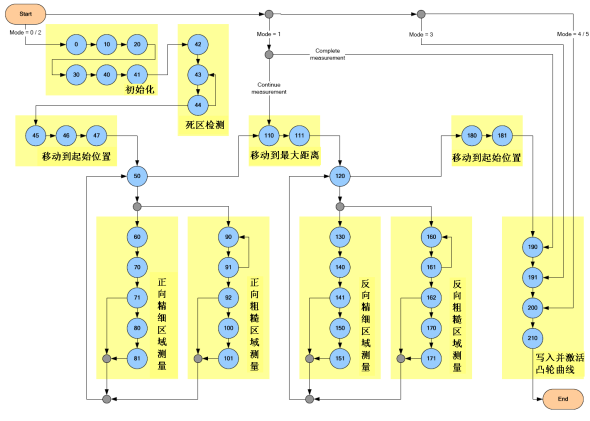
�D 17��FB 520 ��42�N��(zh��)��B(t��i)��State��
5.��(zh��)�нY(ji��)��
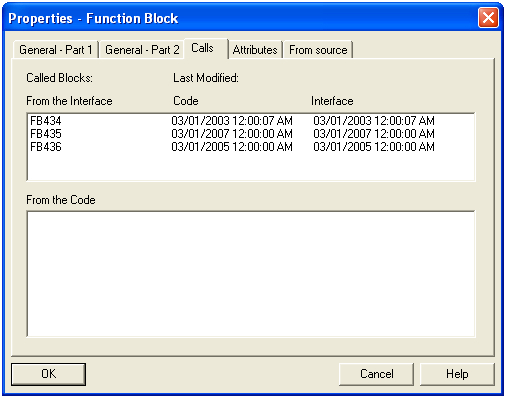
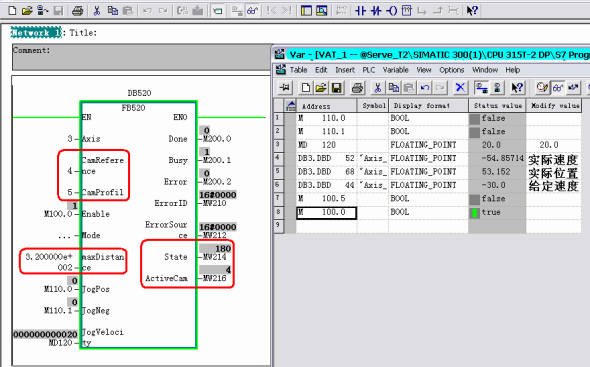
��FB520��(zh��)���Ԅәz�y֮����ͨ�^�ھ��ķ�ʽ�쿴�y���������a����������D 18��
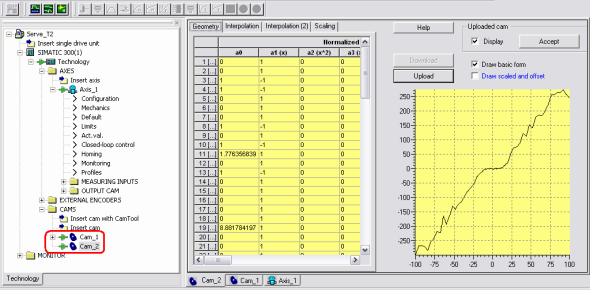
�D 18. �ھ��쿴�y���������a������
���@���ֹ��Һ���ŷ��S���a�������ѽ�(j��ng)�������� TCPU �оͿ���ʹ���䶨λ���܉K��Һ���S�M�п����ˣ����������Ԅ�ʹ���a�������е��ٶȌ���(y��ng)�P(gu��n)ϵ�{(di��o)��(ji��)ݔ�������P(gu��n)����Һ���S��ʹ��Ո���� TCPU �փ�
1 ϵ�y(t��ng)����
MASTERDIVE �����6SE70ϵ��׃�l������VC�� MC�ɷN׃�l����
MC ���T��(y��ng)�����\�ӿ���ϵ�y(t��ng)���V����(y��ng)���ھ��ӹ��ИI(y��)��܇����ӡˢ���������Cе�ӹ��ȡ�
ʹ��MC�������Ɍ��F(xi��n)���¹��ܣ�
•® �ٶȿ���
•® λ�ÿ���
•® �b��֮�g�Ľ�ͬ������
MC�а���ģ�K����ܛ���O(sh��)Ӌ��
•® ��������ɹ��܉K������������λ���ܣ�
•® ��ˇܛ����F01
MCϵ�y(t��ng)�Ĺ��ʲ����cVC�Ĺ��ʲ�����ͬ�����ղ�ͬ�b�ýY(ji��)��(g��u)�Ʉ��֞飨Ҋ�D1����

�D1
���������������b�ã����ư��c����Ԫ����һ�w���Եõ����Ӿo���ĽY(ji��)��(g��u)�����������b�ú��b�C�b�����b�Ät���Ъ���������䣬���ư���Բ�Σ�������Q�����Q�����ͻ��b�C�b�����b�õĿ��ư�������£�

�D2
2 ���a����ʹ��
MCҪ���F(xi��n)��λ���ƣ���Ҫʹ�þ��a�������ٶȺ�λ�õķ�����̖��
���a���ڰ��bʹ���Ϸ֞�늙C���a�����ⲿ���a�������߿���ͬ�rʹ�ã�Ҳ���ԆΪ�ʹ�á�
늙C���a�������b��늙C�S�ϣ����Ԝy��늙C���D(zhu��n)���Լ�늙C��λ�ã�ͬ�r����ͨ�^�Cе�O(sh��)���׃���P(gu��n)ϵ����ӳ���Cе�O(sh��)���λ�á�
�ⲿ���a�������b�ڙCе�O(sh��)���ϣ����ڙz�y�O(sh��)���λ�ã����Ը��ʴ_�ط�ӳ��K�Cе�O(sh��)���λ�á�
늙C���a����Ҫ�����a�����b��C�ۡ�
����ʹ�õľ��a����ͣ��Լ����a���ӿ�ģ����D3��ʾ
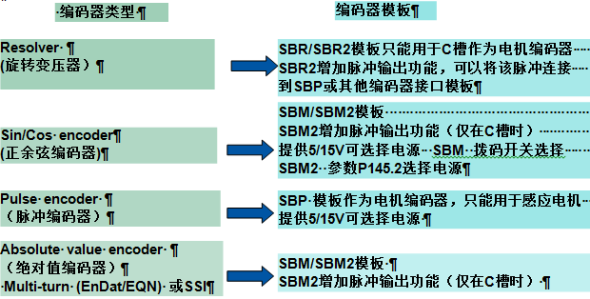
�D3
3 늙C���
MC�����������(q��)��ͬ��늙C������늙C, ���ͨ�^P095�M���x���D4��

�D4
ע�⣺
��ʹ������ͬ��늙C�r����Ҫע���D(zhu��n)�����c�Ć��}��
���T�Ә˜�ͬ���ŷ�늙C�ڳ��S�r���ѽ�(j��ng)���C���a�������c�c�D(zhu��n)�����c����(y��ng)���˕r��Ҫ���C������|������U,V,W�c׃�l����ݔ��������ͬ��
���ڛ]�д_���D(zhu��n)�ӘOλ�õ�ͬ��늙C�������Ñ��Լ����Q�˾��a������Ҫ�M���D(zhu��n)�����c��У������t����(d��o)��늙Cʧ�ء�
4 ϵ�y(t��ng)�O(sh��)��
4.1 �֏�(f��)���S�O(sh��)��
��һ��ʹ��MC�������������M�Ѕ���(sh��)�Ĺ��S��(f��)λ�����C����(sh��)�֏�(f��)�����S�O(sh��)��ֵ��
 ���T��6SE7041-2WL84-1JC1
���T��6SE7041-2WL84-1JC1
�D5
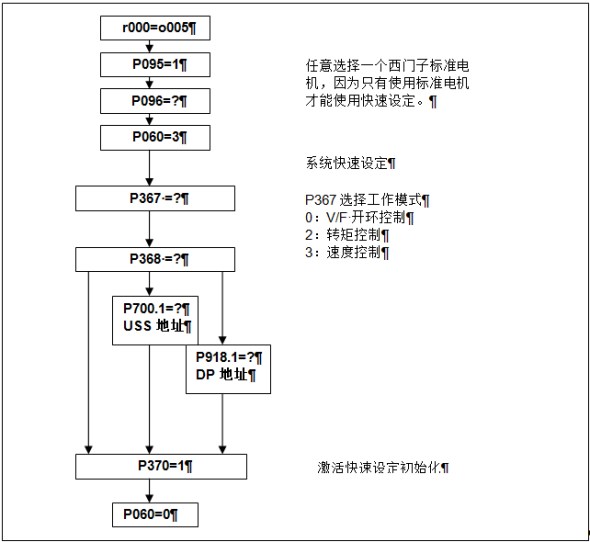
4.2ʹ�����T�Ә˜�늙C�r��ϵ�y(t��ng)����(sh��)�O(sh��)��

�D6
4.3 ������늙C�O(sh��)��
��ʹ�õ�����늙C�r������Ñ���Ҫʹ�ؘʵĿ��Ʒ����t��Ҫ�����M�����в�����
�D7

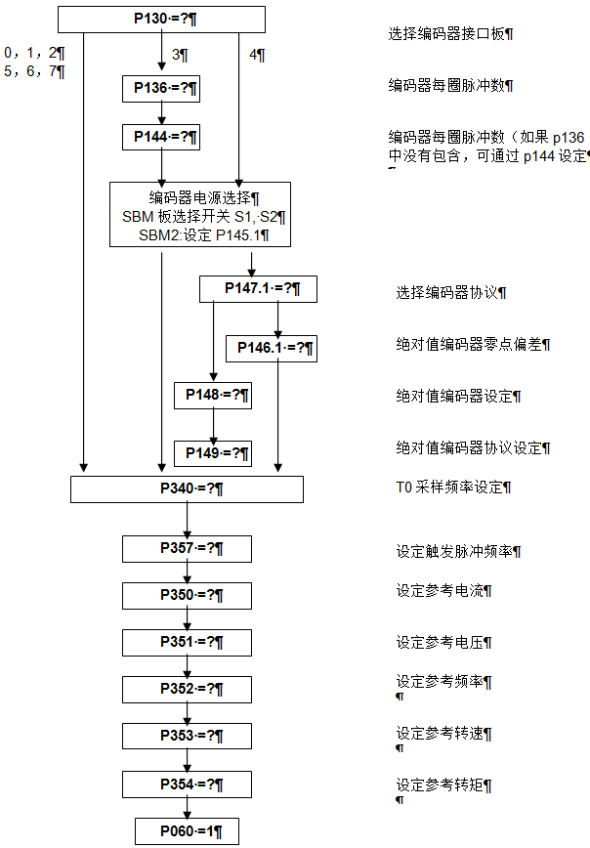
�D8
���ڵ�����늙Cͨ�����ṩ늙C���迹�ȅ���(sh��)��������Ҫ�M�Ѓ�(y��u)���팤���@Щ늙C�ą���(sh��)��

�D9
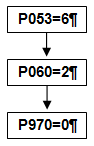
5 ϵ�y(t��ng)�˜����ã�p368��
p368=1 ���ӿ���
�D10
p368=2���Ӻ̶��l���O(sh��)������
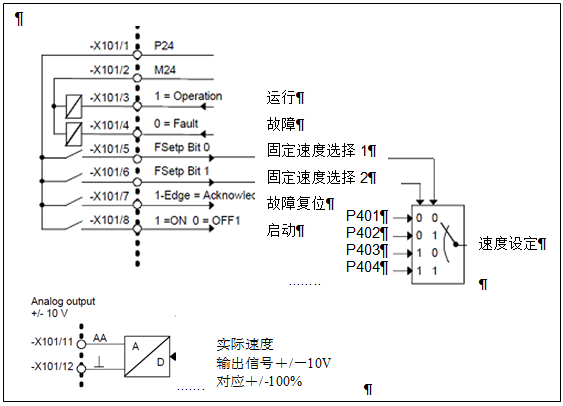
�D11
p368=3���Ӻ�늄��λӋ�O(sh��)������

�D12
p368=0 PMU�����ƣ��H���ڕ����ͺ��b�C�b�����b�ã�

�D13
p368=4 USSͨӍ����

�D14
p368=6 PROFIBUS DP ͨӍ����

�D15
6 DriveMonitorܛ���{(di��o)ԇ
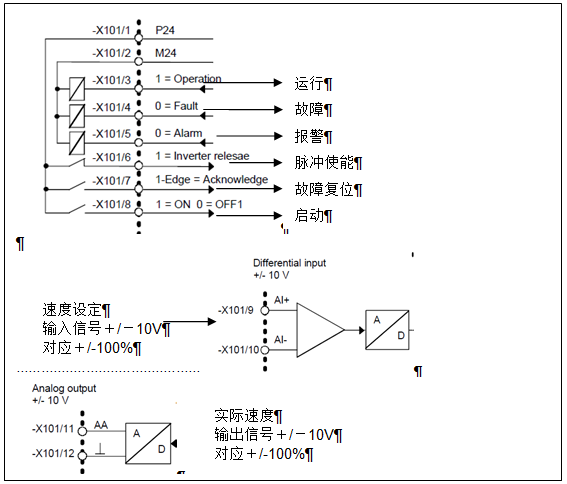
���_ܛ�����O(sh��)���B�Ӷ˿ڣ�
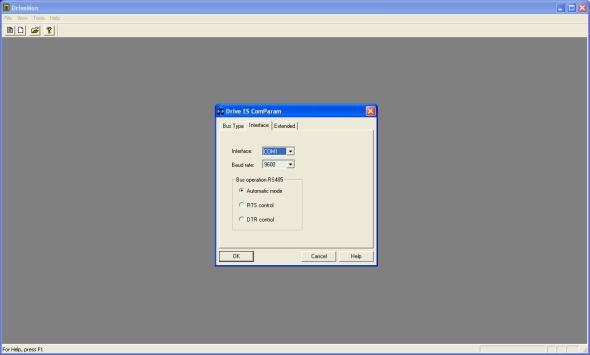
�D16ϣ��늚⼼�g(sh��)(�Ϻ�)����˾(���T�Ӻ�����飩
(li��n) ϵ �� ������(j��ng)��(�N�۹��̎���
�ھ��̄�(w��)Q Q :192061030
(li��n) ϵ �� �C ��18621061383(�ţ�
�x���b����ͣ���������(sh��)����

�D17
�M��?y��n)��?sh��)�����x���ھ��B�Ӱ��o��

�D18
���_��Ļ�²����ߙڵIJ�����壺

�D19
��������Ո����ͨ�^ԓ��������M�п��ƣ�����������ϵ�y(t��ng)����(sh��)�O(sh��)����

�D20
7 ����λ�ÿ�����
�ڱ��C�ٶ�ģʽ�����������������Ҫʹ��MCϵ�y(t��ng)�Ķ�λ���ܣ��t��Ҫ�քӼ���λ�ÿ�������
�O(sh��)��P210=1���ɡ�ͨ�����õĶ�λ��ʽ���������N��
1.® ֱ��λ�ÿ���
��ԓ��ʽ�£�ͨ�^����(sh��)P209�O(sh��)��Ŀ��λ�ã��چ��������늙Cֱ���\�е�Ŀ��λ�ã�ԓģʽ���^���Σ��������a(ch��n)���_����������O(sh��)��Ŀ��λ�õĕr�M�����O(sh��)��λ�ý�(j��ng)�^б�°l(f��)�����ķ�ʽ����o�����Ա���λ���O(sh��)�����A�S��
2. ®������λ����
��MC�����ɹ��܉K�У����T�_�l(f��)�˻�����λ���ܣ����Ԍ��F(xi��n)һЩ���εĶ�λ�������܉�M��^�ֵĶ�λ���ơ�Ԕ������������Ҋ������λ���ܺ����{(di��o)ԇ�փԡ�
3.® F01��ˇܛ��
��MC��ͬ�r�����˸���ȫ��Ķ�λ���ƹ�ˇ�������ԝM���N��(f��)�s�Ķ�λ����Ҫ����Ҫʹ��ԓܛ��������Ҫُ�I�ڙ�(qu��n)�a��������ԓ��ˇ�����P(gu��n)��F01��ˇܛ����ʹ�ã�Ո����F01�����{(di��o)ԇ�փԡ�
6RA70 (������B6C)
6RA7018-6DS22-0 3AC 400V 485V 30A 325V 5A
6RA7025-6DS22-0 60A 10A
6RA7028-6DS22-0 90A 10A
6RA7031-6DS22-0 125A 10A
6RA7075-6DS22-0 210A 15A
6RA7078-6DS22-0 280A 15A
6RA7081-6DS22-0 400A 25A
6RA7085-6DS22-0 600A 25A
6RA7087-6DS22-0 850A 30A
6RA7025-6GS22-0 3AC 575V 690V 60A 325V 5A
6RA7031-6GS22-0 125A 10A
6RA7075-6GS22-0 210A 15A
6RA7081-6GS22-0 400A 25A
6RA7085-6GS22-0 600A 25A
6RA7087-6GS22-0 800A 30A
6RA7086-6KS22-0 3AC 690V 900V 720A 30A
6RA70(���෴����) (B6) A (B6) C
6RA7013-6DV62-0 3AC 400V 420V 15A 325V 3A
6RA7018-6DV62-0 30A 5A
6RA7025-6DV62-0 60A 10A
6RA7028-6DV62-0 90A 10A
6RA7031-6DV62-0 125A 10A
6RA7075-6DV62-0 210A 15A
6RA7078-6DV62-0 280A 15A
6RA7081-6DV62-0 400A 25A
6RA7085-6DV62-0 600A 25A
6RA7087-6DV62-0 850A 30A
6RA7025-6GV62-0 3AC 575V 600V 60A 325V 5A
6RA7031-6GV62-0 125A 10A
6RA7075-6GV62-0 210A 15A
6RA7081-6GV62-0 400A 25A
6RA7085-6GV62-0 600A 25A
6RA7087-6GV62-0 850A 30A
6RA7086-6KV62-0 3AC 690V 725V 760A 325V 30A
�ӿ�ģ��
6ES7151-1AA04-0AB0 �˜��ͽӿ�ģ�K IM151-1
6ES7151-1AB02-0AB0 ET 200S IM 151 ���w�ӿ�ģ��
6ES7151-1BA02-0AB0 �������ͽӿ�ģ�K IM151-1
6ES7151-1CA00-0AB0 �����ͽӿ�ģ�K IM151-1
6ES7151-7AB00-0AB0 ET 200S IM 151 ��CPU ���w�ӿ�ģ��
6ES7153-1AA03-0XB0 DP��վ�ӿ�ģ�KIM153-1 6.6�M
6ES7138-4HA00-0AB0 DP-��վģ�K��for CPU only)
���w����
6GK1 901-0FB00-0AA0 ��B������100����
6ES7 195-1BE00-0XA0 ���^�m������50����
�Դģ�K
6ES7 138-4CA01-0AA0 PM-E DC 24V �������ģ��
6ES7 138-4CB11-0AB0 PM-E DC 24V �� AC 120/230V �������ģ��
6ES7 138-4CF02-0AB0 ������ȫ���Դ����ģ�KPM-E��24V ֱ��
���ģ�K
�_�P(gu��n)��ݔ��ģ�K
6ES7 131-4BB01-0AA0 2·�_�P(gu��n)��ݔ�� 24VDC �˜� ��5�K��
6ES7 131-4BB01-0AB0 2·�_�P(gu��n)��ݔ�� 24VDC ������ ��5�K��
6ES7 131-4BD01-0AA0 4·�_�P(gu��n)��ݔ�� 24VDC �˜� ��5�K��
6ES7 131-4BD01-0AB0 4·�_�P(gu��n)��ݔ�� 24VDC ������ ��5�K��
6ES7 131-4BD51-0AA0 4·�_�P(gu��n)��Դݔ�� 24VDC �˜� ��5�K��
6ES7 131-4CD00-0AB0 4·�_�P(gu��n)��ݔ�� UC 24V...48V �� LED SF (�M����)ÿ���b5��
6ES7 131-4EB00-0AB0 2·�_�P(gu��n)��ݔ�� 120VAC ��5�K��
6ES7 131-4FB00-0AB0 2·�_�P(gu��n)��ݔ�� 230VAC ��5�K��
6ES7 131-4RD00-0AB0 4·�_�P(gu��n)��ݔ�� DC 24V NAMUR 15 MM ������LED SF ��ÿ���b5��
�_�P(gu��n)��ݔ��ģ��
6ES7 132-4BB01-0AA0 2·�_�P(gu��n)��ݔ�� 24VDC 0,5A �˜� ��5�K��
6ES7 132-4BB01-0AB0 2·�_�P(gu��n)��ݔ�� 24VDC 0,5A ������ ��5�K��
6ES7 132-4BD01-0AA0 4·�_�P(gu��n)��ݔ�� 24VDC 0,5A �˜� ��5�K��
6ES7 132-4BB31-0AA0 2·�_�P(gu��n)��ݔ�� �˜��� ֱ��24V/2A��ÿ���b5��
6ES7 132-4BB31-0AB0 2·���������_�P(gu��n)��ݔ�� ֱ��24V/2A��ÿ���b5��
6ES7 132-4BD32-0AA0 4·�_�P(gu��n)��ݔ�� 24VDC 2A �˜� ��5�K��
6ES7 132-4FB01-0AB0 2·�_�P(gu��n)��ݔ�� ����120/230V��ÿ���b5��
6ES7 132-4HB01-0AB0 2·�^���ݔ�� 24VDC/230VAC 5A ��5�K��
6ES7 132-4HB10-0AB0 2·�^���ݔ�� �^���ֱ��24V-48V/5A������24V-230V/5A��5�K��
ģ�M��ݔ��ģ��
6ES7 134-4FB01-0AB0 2·ģ�M��ݔ�� 늉���̖ �˜�
6ES7 134-4FB51-0AB0 2·������ģ�M��ݔ�� 늉� +/-10V��ģ�K���ڕr�g�� 1MS
6ES7 134-4LB02-0AB0 2·ģ�M��ݔ�� 늉���̖ ������ (16λ)
6ES7 134-4GB01-0AB0 2·ģ�M��ݔ�� �����̖ �˜� 2����
6ES7 134-4GB51-0AB0 2·������ģ�M��ݔ�� I-2�� 4 - 20MA��ģ�K���ڕr�g�� 1MS��
6ES7 134-4GB11-0AB0 2·ģ�M��ݔ�� �����̖ �˜� 4����
6ES7 134-4GB61-0AB0 2·������ģ�M��ݔ�� I-4�� 4 - 20MA��ģ�K���ڕr�g�� 1MS
6ES7 134-4MB02-0AB0 2·ģ�M��ݔ�� �����̖ ������ (16λ) 2����
6ES7 134-4JB50-0AB0 2·ģ�M��ݔ�� RTD�������̖
6ES7 134-4JB00-0AB0 2·ģ�M��ݔ�� ���ż��̖
6ES7 134-4NB01-0AB0 2·��������ģ�M��ݔ�� ���ż��̖������(n��i)���ض��a��
6ES7 134-4NB51-0AB0 2·��������ģ�M��ݔ�� RTD�������̖�� �������ă�(n��i)���a��
ģ�M��ݔ��ģ��
6ES7 135-4FB01-0AB0 2·ģ�M��ݔ�� 늉���̖ �˜�
6ES7 135-4GB01-0AB0 2·ģ�M��ݔ�� �����̖ �˜�
6ES7 135-4LB02-0AB0 2·ģ�M��ݔ�� 늉���̖ ������ (16λ)
6ES7 135-4MB02-0AB0 2·ģ�M��ݔ�� �����̖ ������ (16λ)
����ģ��
6ES7 138-4DA04-0AB0 1��Ӌ��(sh��)��24V/100KHZ
6ES7 138-4DB03-0AB0 SSI �^��λ�Ùz�yģ��
6ES7 138-4DD00-0AB0 2 Pulse (pulse width modulation, timer)
6ES7 138-4DC00-0AB0 STEP1 ���M늙Cģ��
6ES7 138-4DF01-0AB0 1 SI ͨӍģ��(RS232 RS422 RS485 ���нӿ�)
6ES7 138-4DF11-0AB0 1�� SI ���нӿڣ���ͨ����RS232/422��485 MODBUS/USS
6ES7 138-4DL00-0AB0 1 POS-U ��λģ�� ����(sh��)����ݔ�� ���� 5V/24V �������a��
6ES7 138-4GA00-0AB0 4 ��IQ-SENSE ֱ��24VC��ÿ���b5��
����ģ�K
6ES7 193-4CC20-0AA0 TM-P15S23-A1 f. PM//2x3 �Դģ�K����Ͷ���
6ES7 193-4CC30-0AA0 TM-P15C23-A1 f. PM/2x3 �Դģ�K�����Ͷ���
6ES7 193-4CD20-0AA0 TM-P15S23-A0 f. PM/2x3 �Դģ�K����Ͷ���
6ES7 193-4CD30-0AA0 TM-P15C23-A0 f. PM/2x3 �Դģ�K�����Ͷ���
6ES7 193-4CE00-0AA0 TM-P15S22-01 f. PM/2x2 �Դģ�K ����Ͷ���
6ES7 193-4CE10-0AA0 TM-P15C22-01 f. PM/2x2 �Դģ�K�����Ͷ���
6ES7 193-4CA20-0AA0 TM-E15S24-A1 f. EM/2x4 ���ģ�K����Ͷ��� ��5�K��
6ES7 193-4CA30-0AA0 TM-E15C24-A1 f. EM/2x4 ���ģ�K�����Ͷ��� ��5�K��
6ES7 193-4CB20-0AA0 TM-E15S24-01 f. EM/2x4 ���ģ�K����Ͷ��� ��5�K��
6ES7 193-4CB30-0AA0 TM-E15C24-01 f. EM/2x4 ���ģ�K�����Ͷ��� ��5�K��
6ES7 193-4CB00-0AA0 TM-E15S23-01 f. EM/2x3 ���ģ�K����Ͷ��� ��5�K��
6ES7 193-4CB10-0AA0 TM-E15C23-01 f. EM/2x3 ���ģ�K�����Ͷ��� ��5�K��
6ES7 193-4CA40-0AA0 TM-E15S26-A1 f��r EM/2x6 ���ģ�K����Ͷ��� ��5�K��
6ES7 193-4CA50-0AA0 TM-E15C26-A1 f��r EM/2x6 ���ģ�K�����Ͷ��� ��5�K��
6ES7 193-4JA00-0AA0 SIMATIC DP��ET 200S����K��ģ�K
����
6ES7 193-4GA00-0AA0 �K��ģ�KTM-P��TM-E���Դ��(d��o)܉ 3 x 10 MM,ÿ��5��
6ES7 193-4GB00-0AA0 �K��Ԫ�������ڽg�������c�Դ��(d��o)܉���B�ӣ�ÿ��5��
ET200M:
6ES7 153-1AA03-0XB0 IM153-1�ӿ�ģ�K
6ES7 153-2BA01-0XB0 IM153-2�ӿ�ģ�K��������(����B��8��ģ�K)
6ES7 153-2BA02-0XB0 IM153-3�ӿ�ģ�K��������(����B��12��ģ�K)
6ES7 153-2AR02-0XA0 IM153��������������2��153��2��1��IM/IM����ģ��
6ES7 153-2BB00-0XB0 IM153-2���w�ӿ�ģ�K
6ES7 195-1GF30-0XA0 ��Դ����ģ�K��DIN��(d��o)܉
6ES7 195-7HA00-0XA0 ��Դ����ģ�KBM PS/IM
6ES7 195-7HB00-0XA0 ��Դ����ģ�KBM 2 X 40
6ES7 195-7HC00-0XA0 ��Դ����ģ�KBM 1 X 80
6ES7 195-7HD10-0XA0 ��ԴIM/IM���࿂��ģ���������
6ES7 193-0CD40-7XA0 TB8�������B�Ӷ���
6ES7 390-5AB00-0AA0 ����Ԫ�� 2 x 2-6mm
6ES7 390-5BA00-0AA0 ����Ԫ�� 1 x 3-8mm
6ES7 390-5CA00-0AA0 ����Ԫ�� 1 x 6-13,5mm