╬„ķTūė┐žųŲŲ„─ŻēK20ų„ÖC¼Fžø
| 6ES72881SR200AA0 | S7-200 SMARTŻ¼CPU SR20Ż¼ś╦£╩ą═ CPU ─ŻēKŻ¼└^ļŖŲ„▌ö│÷Ż¼220 V AC ╣®ļŖŻ¼12 ▌ö╚ļ/8 ▌ö│÷ |
| 6ES72881ST200AA0 | S7-200 SMARTŻ¼CPU ST20Ż¼ś╦£╩ą═ CPU ─ŻēKŻ¼Š¦¾w╣▄▌ö│÷Ż¼24 V DC ╣®ļŖŻ¼12 ▌ö╚ļ/8 ▌ö│÷ |

S7-200 SMART ┼c S7-200ę╗śėŻ¼ų¦│ų8┬ĘPID┐žųŲŻ¼ų¦│ų─ŻöM┴┐▌ö│÷╝░PWM▌ö│÷
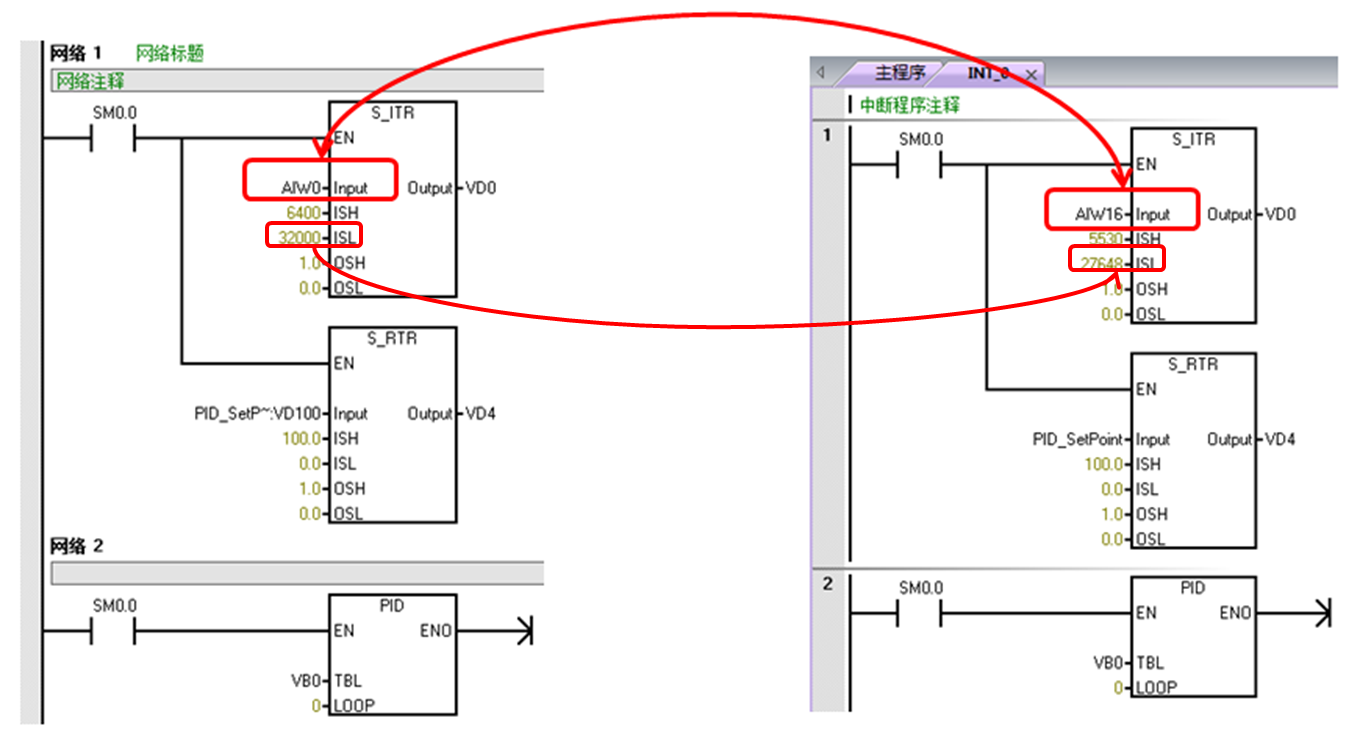
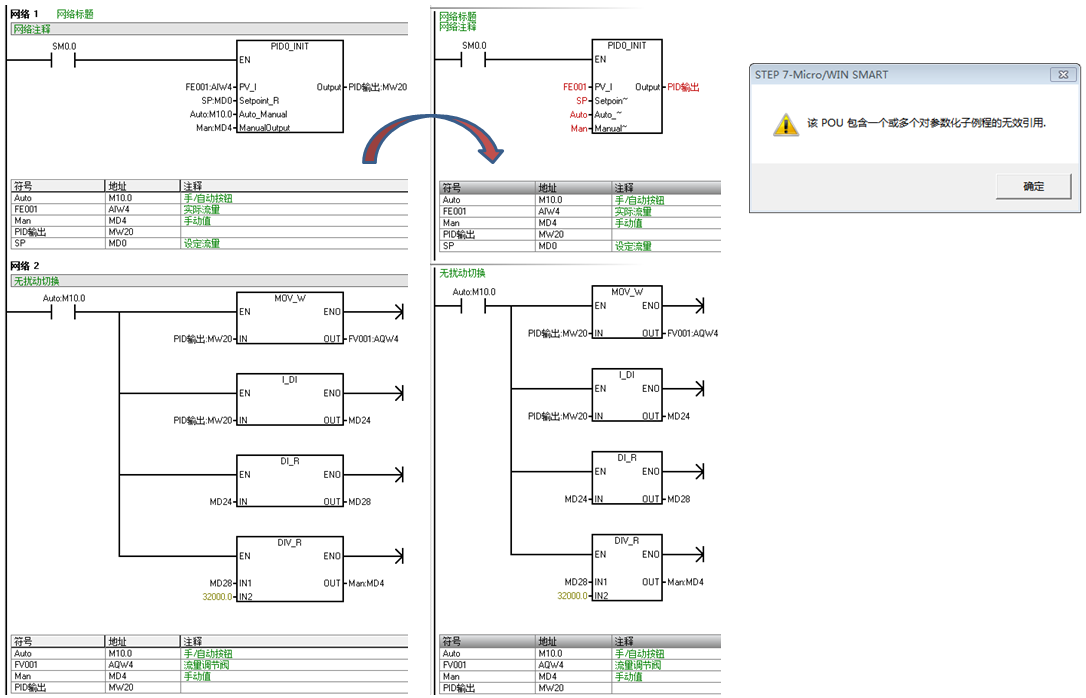
īó S7-200 ĦėąPIDŽ“ī¦╔·│╔Ą─│╠ą“ė├ S7-200 SMART┤“ķ_Ż¼╠ß╩ŠÕeš`Ż¼╚ńŽ┬łD╦∙╩ŠŻ║
łD1. S7-200 PID│╠ą“į┌S7-200 SMART ┤“ķ_ł¾Õe
ĮŌøQĘĮĘ©Ż║
1Ż¼ą┬Į© S7-200 SMARTĒŚ─┐Ż¼▓ó▀Mąąš²┤_Ą─įOéõĮMæB
2Ż¼īó S7-200│╠ą“ė├STEP 7-Micro/win SMART ▄ø╝■┤“ķ_Ż¼īó│²PIDūė│╠ą“ų«═ŌĄ─│╠ą“Č╬Å═ųŲĄĮą┬ĒŚ─┐
3Ż¼ą▐Ė─ą┬ĒŚ─┐Ą─ I/O ĄžųĘ╝░─ŻöM┴┐▐DōQ┴┐│╠┼cS7-200 SMART Ųź┼õ
▒╚▌^ S7-200 ┼c S7-200 SMART PID╗ž┬Ę▒ĒŻ¼ā╔š▀═Ļ╚½ŽÓ═¼Ż¼╚ńŽ┬▒Ē╦∙╩ŠŻ║
▒Ē1. S7-200 ┼c S7-200 SMART PID ╗ž┬Ęī”▒╚▒Ē
|
Ų½ęŲ |
ŅÉą═ |
S7-200 | S7-200 SMART |
|---|---|---|---|
| 0 |
▀^│╠ūā┴┐(PVn) |
░³║¼▀^│╠ūā┴┐Ż¼ŲõųĄ▒žĒÜś╦Č©į┌ 0.0 ĄĮ 1.0 ų«ķg |
|
| 4 |
įOČ©ųĄ(SPn) |
░³║¼įOČ©ųĄŻ¼ŲõųĄ▒žĒÜś╦Č©į┌ 0.0 ĄĮ 1.0 ų«ķg |
|
| 8 |
▌ö│÷(Mn) |
░³║¼ėŗ╦Ń│÷Ą─▌ö│÷Ż¼ŲõųĄ▒žĒÜś╦Č©į┌ 0.0 ĄĮ 1.0 ų«ķg |
|
| 12 |
į÷ęµ(Kc) |
░³║¼į÷굯¼×ķ▒╚└²│ŻöĄĪŻ ┐╔ęį╩Ūš²öĄ╗“žōöĄ |
|
| 16 |
▓╔śėĢrķg |
░³║¼▓╔śėĢrķgŻ¼å╬╬╗×ķ├ļĪŻ ▒žĒÜ╩Ūš²öĄ |
|
| 20 |
ĘeĘųĢrķg |
░³║¼ĘeĘųĢrķg╗“Å═╬╗Ż¼å╬╬╗×ķĘų |
|
| 24 |
╬óĘųĢrķg |
░³║¼╬óĘųĢrķg╗“╦┘┬╩Ż¼å╬╬╗×ķĘų |
|
| 28 |
Ų½ų├ |
░³║¼Ų½ų├╗“ĘeĘų║═ųĄŻ¼Įķė┌ 0.0 ĄĮ 1.0 ų«ķg |
|
| 32 |
Ū░ę╗▀^│╠ūā┴┐ |
░³║¼╔Ž┤╬ł╠ąą PID ųĖ┴ŅĢr┤µā”Ą─▀^│╠ūā┴┐ųĄ |
|
| 36 |
PIDöUš╣▒Ē |
Ī«PIDAĪ»Ż©PID öUš╣▒ĒŻ¼░µ▒Š AŻ®Ż║ ASCII │ŻöĄ |
|
| 40 |
AT ┐žųŲ |
||
| 41 |
AT ĀŅæB |
||
| 42 |
AT ĮY╣¹ |
||
| 43 |
AT ┼õų├ |
||
| 44 |
Ų½▓Ņ |
ūŅ┤¾ PV š±╩ÄĘ∙Č╚Ą─ś╦£╩╗»ųĄŻ©ĘČć·Ż║ 0.025 ĄĮ 0.25Ż® |
|
| 48 |
£■║¾ |
ė├ė┌┤_Č©▀^┴ŃĄ─ PV £■║¾ś╦£╩╗»ųĄŻ©ĘČć·Ż║ 0.005 ĄĮ 0.1Ż® |
|
| 52 |
│§╩╝▌ö│÷ļA▄S |
▌ö│÷ųĄųąļA▄Sūā╗»Ą─ś╦£╩╗»┤¾ąĪŻ¼ė├ė┌╩╣ PV «a╔·š±╩ÄŻ©ĘČć·Ż║0.05 ĄĮ 0.4Ż® |
|
| 56 |
┐┤ķT╣ĘĢrķg |
ā╔┤╬▀^┴Ńų«ķgį╩įSĄ─ūŅ┤¾├ļöĄųĄŻ©ĘČć·Ż║60 ĄĮ 7200Ż® |
|
| 60 |
Į©ūhį÷ęµ |
ūįš¹Č©▀^│╠┤_Č©Ą─Į©ūh╗ž┬Ęį÷ęµ |
|
| 64 |
Į©ūhĘeĘųĢrķg |
ūįš¹Č©▀^│╠┤_Č©Ą─Į©ūhĘeĘųĢrķg |
|
| 68 |
Į©ūh╬óĘųĢrķg |
ūįš¹Č©▀^│╠┤_Č©Ą─Į©ūh╬óĘųĢrķg |
|
| 72 |
īŹļHļA▄S┤¾ąĪ |
ūįš¹Č©▀^│╠┤_Č©Ą─ś╦£╩╗»▌ö│÷ļA▄S┤¾ąĪųĄ |
|
| 76 |
īŹļH£■║¾ |
ūįš¹Č©▀^│╠┤_Č©Ą─ś╦£╩╗» PV £■║¾ųĄ |
|
╚ń╔Ž▒Ē╦∙╩ŠŻ¼ā╔š▀PID╗ž┬Ę▒Ē═Ļ╚½ę╗ų┬Ż¼╦∙ęįŻ¼«öīóS7-200 PID ųĖ┴ŅŠÄ│╠▀MąąęŲų▓ĢrŻ¼ąĶīóĘ┤ü┼c▌ö│÷Ą──ŻöM┴┐ĄžųĘ░┤šš S7-200 SMART Ą─ĄžųĘĘų┼õ▀Mąąą▐Ė─Ż¼═¼Ģrą▐Ė──ŻöĄ▐DōQöĄųĄ╝┤┐╔ĪŻ╚ńŽ┬łD╦∙╩ŠŻ║